Introduction
The discussion point of this particular blog revolves around the “Robotic Arm Focussed Localization & Tumour Removal in the Surgical Department of a Healthcare Facility”. Long-Distance Robot-Assisted Surgery & Tumour Removal is still not in regular practice but Computer Vision can play a pivotal role towards making it a success in the trial phase. The same once successful can be an active
participant in Operation Theatres.
Robotic Assisted Surgical Unit Description
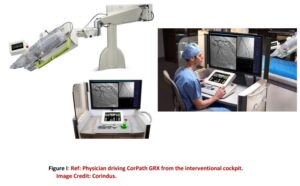
The unit would consist of an Extended Reach Arm and a Robotic Drive. The Robotic Drive, receives inputs from the control console in the cockpit. The Surgeon would work from the Interventional Cockpit, which contains both the Robot Control Subsystem and a Telepresence Communication System which links the physician to the Robot in the Operation Theatre. The unit is pictorially
represented in Figure I.
Challenges
The main challenge for such an implementation lies in the fact that the Principal Physician is not present in the room during the procedure. In fact, he can be many miles away, only manoeuvring the Robot to perform the operation to perfection and that too from a Remote Workstation. Performing an intricate procedure, can remotely pose significant Design Challenges, chief among them being
Real-time, end-to-end Video Capture and Processing. Physicians might operate less effectively when there is significant lag or latency in the images they see and commands they send over a network.
Outcomes
The challenges give a breakthrough opportunity for Model Based Design to be implemented before real time deployment. Though an old concept it can be served in a new form to cater to the healthcare fraternity. Hence, OpenCV needs to combine with other algorithms to establish this Proof of Concept. The Detection of Tumour Localization or Classifying the Tumour has long been an active or core research activity for the Image Processing enthusiasts. Texture based filtering Technique with Contour Detection can be used not only to demarcate the boundary of the Tumour but also extract the Tumour from other backgrounds. OpenCV offers Gabor Filter, Entropy Filters etc to cater
to the Texture based filtering problem and for Contour detection it uses conventional Edge Detection techniques like Sobel, Canny, Prewitt, Roberts etc. The Edge detectors are primarily high pass filters used to capture the boundaries or contours in images. The Texture based Filtering approach captures the abrupt change in intensities to capture the entire Textured Regions. The Texture based regions would be accentuated as a result.
Recent Example & Future Directions
A long-distance Robot assisted Heart Surgery viz-a-viz Angioplasty & Stent Implantation is given in Figure I. This could actually pave the way for many such product development particularly towards the Tumour Removal aspect in the future.
In 2018, five patients at the Apex Heart Institute in Ahmedabad, India, received treatment for coronary artery disease (CAD) the same way 3 million others do each year: a small balloon was inserted into an artery in the heart and inflated, making way for the placement of a stent to keep the vital pathway open
The procedure, known as percutaneous coronary intervention (PCI), is the standard treatment for atherosclerosis, a common CAD marked by the build-up of plaque inside the arteries and a subsequent restriction of blood flow. Like many patients before them, their operation was assisted by a robot—the CorPath GRX robotic platform
Yet unlike anyone else before them, these five patients were part of an amazing first; their Principal Physician was not in the room with them during the procedure. In fact, he was 20 miles away, guiding the Robot—performing the operation to perfection—from a Remote Workstation.
Ref: The procedure, known as percutaneous coronary intervention (PCI), is the standard treatment for atherosclerosis, a common CAD marked by the build-up of plaque inside the arteries and a subsequent restriction of blood flow. Unlike many patients before them, their operation was assisted by a robot—the CorPath GRX robotic platform from Corindus, A Siemens Healthineers Company.
Name of Author: DEBAJIT SEN
E-mail id: sen.debajit@gmail.com
debajit_sen@outlook.com
Author Biography:
DEBAJIT SEN has close to 12 years’ experience in the field of Robotic Process Automation, Artificial Intelligence & Data Science, Machine
& Deep Learning, Signal & Image Processing and Computer Vision applications. He has implemented numerous projects in the space of Manufacturing, Security & Surveillance and Biomedical & Healthcare Domain. Currently working as a Data Scientist in a Healthcare Organization. Presently, working on the development of RPA based Intelligent Content Processing (OCR & NLP based) for Healthcare Insurance Analytics encompassing automation of Claim Forms Processing, Electronic Health Record Processing, Prior-Authorization, Dispute and Appeals & Grievances. He has worked as an Independent Researcher / Consultant collaborating for various R & D Projects with different Institutes. He has also published numerous papers in various National & International Journals, Conferences of repute & also has an International Innovation Patent Grant from the Australian Government (IP Australia) to his name for a novel work in the domain of medical science.